关于A*算法网上介绍的有很多,我只是看了之后对这个算法用c写了一下,并测试无误后上传以分享一下,欢迎指正!下面是我找的一个介绍,并主要根据这个实现的。
寻路算法不止 A* 这一种, 还有递归, 非递归, 广度优先, 深度优先, 使用堆栈等等, 有兴趣的可以研究研究~~
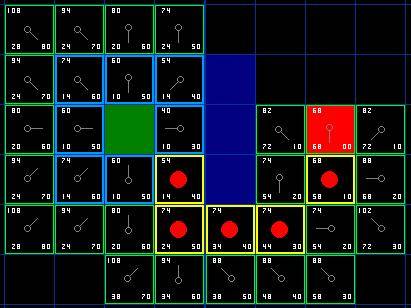
简易地图

如图所示简易地图, 其中绿色方块的是起点 (用 A 表示), 中间蓝色的是障碍物, 红色的方块 (用 B 表示) 是目的地. 为了可以用一个二维数组来表示地图, 我们将地图划分成一个个的小方块.
二维数组在游戏中的应用是很多的, 比如贪吃蛇和俄罗斯方块基本原理就是移动方块而已. 而大型游戏的地图, 则是将各种"地貌"铺在这样的小方块上.
寻路步骤
1. 从起点A开始, 把它作为待处理的方格存入一个"开启列表", 开启列表就是一个等待检查方格的列表.
2. 寻找起点A周围可以到达的方格, 将它们放入"开启列表", 并设置它们的"父方格"为A.
3. 从"开启列表"中删除起点 A, 并将起点 A 加入"关闭列表", "关闭列表"中存放的都是不需要再次检查的方格

图中浅绿色描边的方块表示已经加入 "开启列表" 等待检查. 淡蓝色描边的起点 A 表示已经放入 "关闭列表" , 它不需要再执行检查.
从 "开启列表" 中找出相对最靠谱的方块, 什么是最靠谱? 它们通过公式 F=G+H 来计算.
F = G + H
G 表示从起点 A 移动到网格上指定方格的移动耗费 (可沿斜方向移动).
H 表示从指定的方格移动到终点 B 的预计耗费 (H 有很多计算方法, 这里我们设定只可以上下左右移动).

我们假设横向移动一个格子的耗费为10, 为了便于计算, 沿斜方向移动一个格子耗费是14. 为了更直观的展示如何运算 FGH, 图中方块的左上角数字表示 F, 左下角表示 G, 右下角表示 H. 看看是否跟你心里想的结果一样?
从 "开启列表" 中选择 F 值最低的方格 C (绿色起始方块 A 右边的方块), 然后对它进行如下处理:
4. 把它从 "开启列表" 中删除, 并放到 "关闭列表" 中.
5. 检查它所有相邻并且可以到达 (障碍物和 "关闭列表" 的方格都不考虑) 的方格. 如果这些方格还不在 "开启列表" 里的话, 将它们加入 "开启列表", 计算这些方格的 G, H 和 F 值各是多少, 并设置它们的 "父方格" 为 C.
6. 如果某个相邻方格 D 已经在 "开启列表" 里了, 检查如果用新的路径 (就是经过C 的路径) 到达它的话, G值是否会更低一些, 如果新的G值更低, 那就把它的 "父方格" 改为目前选中的方格 C, 然后重新计算它的 F 值和 G 值 (H 值不需要重新计算, 因为对于每个方块, H 值是不变的). 如果新的 G 值比较高, 就说明经过 C 再到达 D 不是一个明智的选择, 因为它需要更远的路, 这时我们什么也不做.

如图, 我们选中了 C 因为它的 F 值最小, 我们把它从 "开启列表" 中删除, 并把它加入 "关闭列表". 它右边上下三个都是墙, 所以不考虑它们. 它左边是起始方块, 已经加入到 "关闭列表" 了, 也不考虑. 所以它周围的候选方块就只剩下 4 个. 让我们来看看 C 下面的那个格子, 它目前的 G 是14, 如果通过 C 到达它的话, G将会是 10 + 10, 这比 14 要大, 因此我们什么也不做.
然后我们继续从 "开启列表" 中找出 F 值最小的, 但我们发现 C 上面的和下面的同时为 54, 这时怎么办呢? 这时随便取哪一个都行, 比如我们选择了 C 下面的那个方块 D.

D 右边已经右上方的都是墙, 所以不考虑, 但为什么右下角的没有被加进 "开启列表" 呢? 因为如果 C 下面的那块也不可以走, 想要到达 C 右下角的方块就需要从 "方块的角" 走了, 在程序中设置是否允许这样走. (图中的示例不允许这样走)

就这样, 我们从 "开启列表" 找出 F 值最小的, 将它从 "开启列表" 中移掉, 添加到 "关闭列表". 再继续找出它周围可以到达的方块, 如此循环下去...
那么什么时候停止呢? —— 当我们发现 "开始列表" 里出现了目标终点方块的时候, 说明路径已经被找到.
如何找回路径
如上图所示, 除了起始方块, 每一个曾经或者现在还在 "开启列表" 里的方块, 它都有一个 "父方块", 通过 "父方块" 可以索引到最初的 "起始方块", 这就是路径.
以上转自http://www.cnblogs.com/technology/archive/2011/05/26/2058842.html
下面是我的代码(c):
一共三个文件:Apath.h 、Apath.c 、main.c 代码中有详细注释(我比较懒吧,就不多说了)。

1 #include2 #include 3 #include 4 #include 5 #include 6 7 #ifndef APATH_H 8 #define APATH_H 9 #endif10 11 #define TURE 112 #define FAULT 013 14 //约定:0是可走的,1表示障碍物不可走,2表示起点,3表示终点,4表示路径15 #define int_0 016 #define int_1 117 #define int_2 218 #define int_3 319 #define int_4 420 21 #define MAP_MAX_X 10 //地图边界,二维数组大小22 #define MAP_MAX_Y 1023 24 typedef struct LNode {25 int data; //对应数组中的数值26 int F; //F = G + H;27 int G; //G:从起点 A 移动到指定方格的移动代价,沿着到达该方格而生成的路径28 int H; //H:从指定的方格移动到终点 B 的估算成本29 int x, y; //对应数组中的坐标30 bool OPen_flag; //在开放列表中为1,不在为031 bool Close_flag; //在关闭列表中为1,不在为032 struct LNode* next; //用于链表排序33 struct LNode* path_next; //用于最终找到的路径34 }LNode, *LinkList;35 36 LinkList InitList(); //返回一个初始化的链表37 LNode** malloc_array2D(int row, int col);38 void free_array2D(LNode **arr);39 LNode** Translate_array(int array[10][10], int row, int col); //将一个普通数组翻译为单链表节点的数组40 void output(LNode **array, int row, int col);41 42 LNode* find_start_LNode(LNode** Arr, int row, int col); //从数组中找到始点43 LNode* find_end_LNode(LNode** Arr, int row, int col); //从数组中找到终点44 45 //忘记这些要干嘛了,重写吧46 bool isExist_ALNode_in_List(LNode* curLNode, LinkList L_OpenList); //查看节点是否在链表中,在返回ture,不在返回fault47 //对关闭列表中的当前节点进行检查,看它周围的节点是否在OpenList链表里,不在:添加进去;在:检查经过它到达起点的G是否最小,是:修改,不是:不修改48 //LNode* check_CloseList_curLNode(LNode* curLNode, LNode* endLNode, LinkList L_OpenList, LinkList L_CloseList, LNode** Arr); 49 50 LNode* pop_OpenList_minNode(LinkList L_OpenList); //返回开放列表中F值最小的节点51 void push_OpenList_Node(LinkList L, LNode *elem); //插入一个节点并排序52 bool insert_Into_CloseList(LNode* min_Open, LinkList L_CloseList);//插入OpenList中F值最小的节点到CloseList中去53 54 55 int count_LNode_G(LNode* curLNode, LNode* aheadLNode); //计算节点的G值56 int count_LNode_H(LNode* curLNode, LNode* endLNode); //计算节点的H值57 int count_LNode_F(LNode* curLNode); //计算节点的F值58 59 bool isExist_openList(LNode* curLNode); //查看节点是否在链表中,在返回ture,不在返回fault60 bool isExist_closeList(LNode* curLNode);61 bool isobstacle(LNode* curLNode);62 void check_around_curNode(LNode* cur, LNode* endLNode, LinkList open_list, LNode** Arr); //检查周围的节点,是否合适加入开放列表
1 #include "Apath.h" 2 3 LinkList InitList() 4 { 5 LinkList L = (LinkList)malloc(sizeof(LNode)); 6 if (L == NULL) 7 { 8 printf("Defeat!"); 9 exit(1); 10 } 11 memset(L,0,sizeof(LNode)); 12 return L; 13 }//LinkList() 14 15 LNode** malloc_array2D(int row, int col) 16 { 17 LNode** map = (LNode**)malloc(row*sizeof(LNode*) + row*col*sizeof(LNode)); 18 LNode* head = (LNode*)(map + row); 19 for (int i = 0; i < row; ++i) 20 map[i] = head + i*col; 21 return map; 22 } 23 24 LNode** Translate_array(int array[][10], int row, int col) 25 { 26 LNode **map = malloc_array2D(10, 10); 27 for (int i = 0; i < row; ++i) 28 for (int j = 0; j < col; ++j) 29 { 30 (map[i] + j)->data = array[i][j]; 31 (map[i] + j)->G = 0; 32 (map[i] + j)->H = 0; 33 (map[i] + j)->F = 0; //(map[i] + j)->G + (map[i] + j)->H; 34 (map[i] + j)->x = i; 35 (map[i] + j)->y = j; 36 (map[i] + j)->Close_flag = 0; 37 (map[i] + j)->OPen_flag = 0; 38 (map[i] + j)->next = NULL; 39 (map[i] + j)->path_next = NULL; 40 } 41 return map; 42 }//Translate_array() 43 44 void free_array2D(LNode **arr) 45 { 46 free(arr); 47 } 48 49 void output(LNode** array, int row, int col) //二维数组的访问必须指明位数,否则编译器不能解析 50 { 51 //for (int i = 0; i < row; ++i) 52 // for (int j = 0; j < col; ++j) 53 // { 54 // (array[i] + j)->F = j; 55 // } 56 for (int i = 0; i < row; ++i) 57 { 58 for (int j = 0; j < col; ++j) 59 { 60 printf("%d\t", (array[i] + j)->data); 61 } 62 printf("\n"); 63 } 64 } 65 66 LNode* find_start_LNode(LNode** Arr, int row, int col) //从数组中找到始点 67 { 68 LNode* start_LNode = NULL; 69 for (int i = 0; i < row; ++i) 70 { 71 for (int j = 0; j < col; ++j) 72 { 73 if (2 == (Arr[i] + j)->data) 74 { 75 start_LNode = (Arr[i] + j); 76 //起点H=0,G=0,F=0 77 start_LNode->G = 0; 78 start_LNode->H = 0; 79 start_LNode->F = 0; //起点,则默认所有值为0 80 return start_LNode; //返回节点 81 } 82 } 83 } 84 return NULL; 85 } 86 LNode* find_end_LNode(LNode** Arr, int row, int col) //从数组中找到终点 87 { 88 LNode* end_LNode = NULL; 89 for (int i = 0; i < row; ++i) 90 { 91 for (int j = 0; j < col; ++j) 92 { 93 if (3 == (Arr[i] + j)->data) 94 { 95 end_LNode = (*(Arr + i) + j); 96 end_LNode->F = 0; 97 end_LNode->G = 0; 98 end_LNode->H = 0; 99 return end_LNode; //返回节点100 }101 }102 }103 return NULL;104 }105 106 int count_LNode_G(LNode* curLNode, LNode* aheadLNode) //计算节点的G值107 {108 if (curLNode->x == aheadLNode->y && curLNode->y == aheadLNode->y)109 return 0;110 if (aheadLNode->x - curLNode->x != 0 && aheadLNode->y - curLNode->y !=0)111 curLNode->G = aheadLNode->G + 14;112 else113 curLNode->G = aheadLNode->G + 10;114 return curLNode->G;115 }116 int count_LNode_H(LNode* curLNode, LNode* endLNode) //计算节点的H值117 {118 curLNode->H = abs(endLNode->x - curLNode->x) * 10 + abs(endLNode->y - curLNode->y) * 10;119 return curLNode->H;120 }121 int count_LNode_F(LNode* curLNode) //计算节点的F值122 {123 curLNode->F = curLNode->G + curLNode->H;124 return curLNode->F;125 }126 127 void push_OpenList_Node(LinkList L, LNode *elem) //按从小到大的顺序128 {129 LNode *p, *q;130 p = q = L;131 while (p->next != NULL && p->F < elem->F)132 {133 q = p;134 p = p->next;135 }136 if (p->F < elem->F) q = p;137 elem->next = q->next;138 q->next = elem;139 //插入成功,更改属性值OPen_flag = 1140 elem->OPen_flag = 1;141 }142 LNode* pop_OpenList_minNode(LinkList L_OpenList ) //返回开放列表中F值最小的节点143 {144 LNode *elem = NULL;145 if (L_OpenList->next) //为了安全,防止访问空指针146 {147 L_OpenList->next->OPen_flag = 0;148 elem = L_OpenList->next;149 L_OpenList->next = L_OpenList->next->next;150 elem->next = NULL;151 }152 else153 printf("have a NULL point in pop_OpenList_mimNode()");154 return elem;155 }156 bool insert_Into_CloseList(LNode* min_Open, LinkList L_CloseList)//插入OpenList中F值最小的节点到CloseList中去157 {158 //对于CloseList中的节点并不需要排序,采用头插法159 min_Open->next = L_CloseList->next;160 L_CloseList->next = min_Open;161 min_Open->Close_flag = 1;162 return TURE;163 }164 165 bool isExist_openList(LNode* curLNode)166 {167 return curLNode->OPen_flag;168 }169 bool isExist_closeList(LNode* curLNode)170 {171 return curLNode->Close_flag;172 }173 bool isobstacle(LNode* curLNode)174 {175 if (curLNode->data == 1)176 return TURE;177 else178 return FAULT;179 }180 bool isJoin(LNode* cur) //该节点是否可以加入开放列表181 {182 if (cur->x > -1 && cur->y > -1) //边界检测183 {184 if (!isExist_closeList(cur) && !isobstacle(cur)) //既不在关闭列表里,也不是障碍物185 {186 return TURE;187 }188 else189 return FAULT;190 }191 return FAULT;192 }193 void insert_open(LNode *Node, LNode* ahead, LNode* endLNode, LinkList open_list, LNode** Arr)194 {195 if (isJoin(Node))196 {197 if (isExist_openList(Node))198 {199 if (Node->x - ahead->x != 0 && Node->y - ahead->y != 0) {200 if (Node->F > (ahead->F + 14))201 {202 count_LNode_G(Node, ahead);203 count_LNode_F(Node); //H值没有改变,所以还是原来的值204 Node->path_next = ahead; //也不用再插入205 }206 }207 else {208 if (Node->F > (ahead->F + 10))209 {210 count_LNode_G(Node, ahead);211 count_LNode_F(Node); //H值没有改变,所以还是原来的值212 Node->path_next = ahead; //也不用再插入213 }214 }215 }216 else {217 count_LNode_G(Node, ahead);218 count_LNode_H(Node, endLNode);219 count_LNode_F(Node);220 Node->path_next = ahead;221 push_OpenList_Node(open_list, Node);222 }223 }224 }225 void check_around_curNode(LNode* cur, LNode* endLNode, LinkList open_list, LNode** Arr)226 {227 int x = cur->x;228 int y = cur->y;229 insert_open(Arr[x] + y - 1, cur, endLNode, open_list, Arr);230 insert_open(Arr[x] + y + 1, cur, endLNode, open_list, Arr);231 insert_open(Arr[x + 1] + y, cur, endLNode, open_list, Arr);232 insert_open(Arr[x + 1] + y - 1, cur, endLNode, open_list, Arr);233 insert_open(Arr[x + 1] + y + 1, cur, endLNode, open_list, Arr);234 insert_open(Arr[x - 1] + y, cur, endLNode, open_list, Arr);235 insert_open(Arr[x - 1] + y + 1, cur, endLNode, open_list, Arr);236 insert_open(Arr[x - 1] + y - 1, cur, endLNode, open_list, Arr);237 } 1 #include2 //#ifndef APATH_H 3 #include "Apath.h" 4 //#endif 5 6 //为简单,干脆把把下面数组转为链表结构的数组 7 //约定:0是可走的,1表示障碍物不可走,2表示起点,3表示终点,4表示路径 8 int array[10][10] = { 9 { 0, 0, 0, 0, 0, 0, 0, 0, 0, 0 },10 { 0, 0, 0, 1, 1, 0, 0, 0, 0, 0 },11 { 0, 0, 0, 0, 1, 0, 0, 0, 0, 0 },12 { 0, 0, 0, 0, 1, 1, 0, 0, 0, 0 },13 { 0, 0, 0, 0, 0, 1, 3, 0, 0, 0 },14 { 0, 0, 2, 0, 0, 1, 0, 0, 0, 0 },15 { 0, 0, 0, 0, 1, 1, 0, 0, 0, 0 },16 { 0, 0, 0, 0, 1, 1, 0, 0, 0, 0 },17 { 0, 0, 0, 1, 1, 0, 0, 0, 0, 0 },18 { 0, 0, 0, 0, 0, 0, 0, 0, 0, 0 } };19 20 int main()21 {22 int row = MAP_MAX_X, col = MAP_MAX_Y;23 printf("hello world!\n");24 LNode **map = Translate_array(array,row, col); //这里将数组的地图转为节点map的地图25 output(map,10,10);26 LinkList open_List = InitList(); //定义并初始化一个开放列表27 LinkList close_List = InitList(); //一个封闭列表28 LNode* startLNode = find_start_LNode(map, row, col);29 LNode* endLNode = find_end_LNode(map, row, col);30 31 LNode* curLNode = startLNode; //当前节点=开始节点32 curLNode->G = 0; //计算节点的三个值33 count_LNode_H(curLNode, endLNode);34 count_LNode_F(curLNode);35 push_OpenList_Node(open_List, curLNode); //先将开始节点插入开放列表36 37 while (curLNode->data != 3)38 {39 //LNode *e = NULL;40 curLNode = pop_OpenList_minNode(open_List);41 insert_Into_CloseList(curLNode, close_List);42 //2、查看起点周围的点是否在开放列表里,不在加入,在检测经过该点F值是否最小等;43 check_around_curNode(curLNode, endLNode, open_List, map);44 }45 while (endLNode->path_next)46 {47 printf("x:%d---y:%d\n", endLNode->path_next->x,endLNode->path_next->y);48 endLNode->path_next = endLNode->path_next->path_next;49 }50 return 0;51 }
测试结果(红线就是要找的路线):


